Trends in Electrical and Electronics Architecture
The automotive has come a long way from the steam driven tricycle of late 18th century to what it is today. Continuously driven by human aspiration for mobility and independence, it isn’t a mere instrument to get from point A to B anymore. Automobiles – and we’ll more specifically talk about cars have become an integral and inseparable part of our life. The expectations from the car has increased significantly – from being reliable and powerful, to safe and comfortable. Not only to be affordable but also to be environmentally sustainable and going on to be connected and autonomous. Along this amazing journey the mechanical marvel has transformed into a mobile supercomputer!
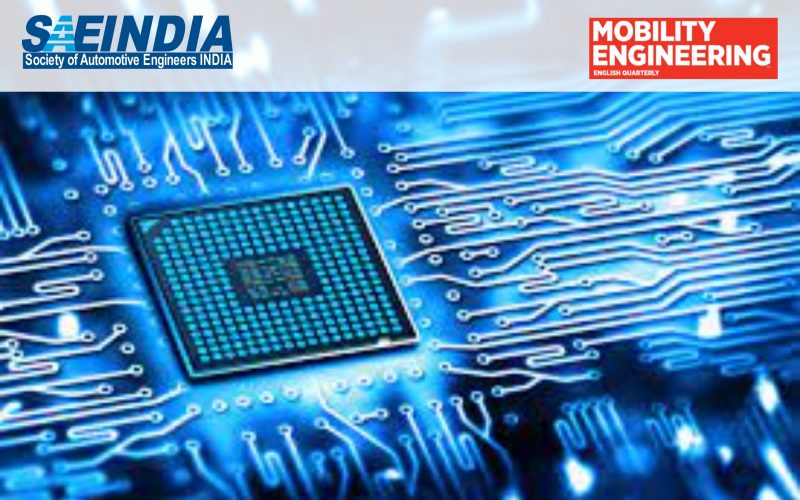
As the complexity of automotive increased, electronic control systems became inevitable. The early electronic systems were simple and oriented towards a single core function. As the controllers were isolated there was no need for a electronic architecture. And with the advent if ‘CAN’ it was possible to design systems which would communicate and collaborate.
The Electrical and Electronic (EE) Architecture in the early days was simply to add a controller for a function and hook them up on CAN. Such an architecture related in distributed features and functions which was not only expressive to develop, but also challenging to produce and maintenance. To give a perspective, a typical car on sale today has more than 100 control units, the wiring harness would by itself weigh more than 50 kgs and runs close to 5kms! This is not just the material cost but gets highly labor intensive for production as well as maintenance.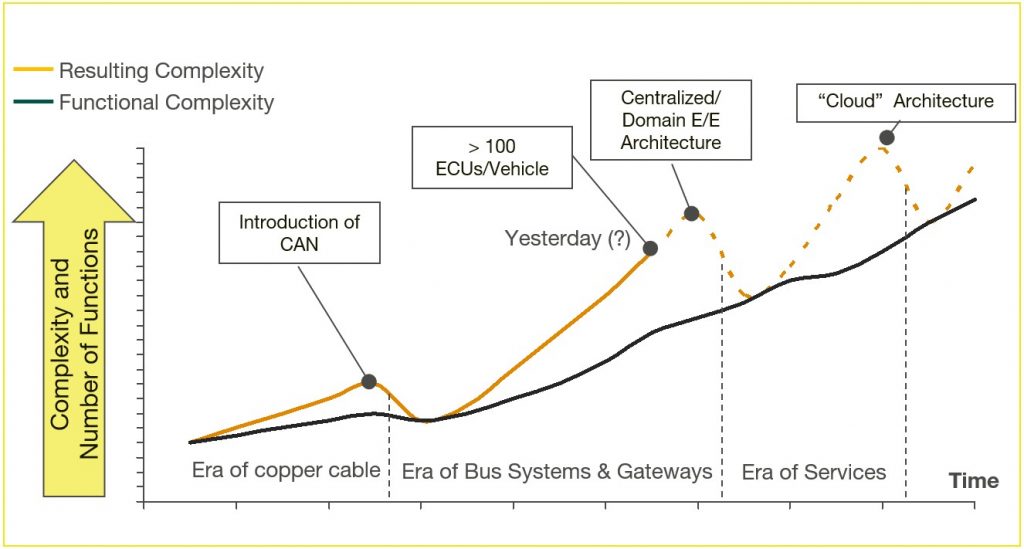
The trend is towards centralization, where clusters of functionally similar controllers are grouped into networks. Each such network will be controlled by a domain controller (ex : for powertrain domain, for chassis domain, for infotainment, for driver assistance..) And at the vehicle level it will be a network of several domain controllers.
Some of the benefits that come out of centralization would be :
› Integration and inter-operability – possibility of moving features across controllers within a domain
› Securing knowledge / Differentiation – keeping sensitive information in a central controller rather than distributing it over multiple units
› Maintenance and security – easier updates (over the air or in garage)
› Data aggregation and analytics – the data for the whole domain is available centrally and accessible for analytics
› Development speed and ‘On demand’ features – centralized domain controllers can be updated post release and can even have optional features that can be monetized by the manufacturer post vehicle sale.
One drawback of such domain architecture is still the connectivity of control units which are physically located in different parts of the vehicle to the domain controller. The wiring harness length and complexity might even increase in some cases compared to flat architecture. So organizing controllers into zones (depending on their location in the vehicle) rather than functional domain would address this issue.
With the advent of automotive Ethernet which can reach Gigabit speeds, very high computational demand coming mainly from driver assistance functions and huge volume of data due to technologies like sensor fusion, the vehicle will need a master controller that would aid in system integration. Such master controllers help in virtualization of software functionality and abstraction from hardware. The master controller can enable seamless movement of features across domains and act as security master monitoring cybersecurity.
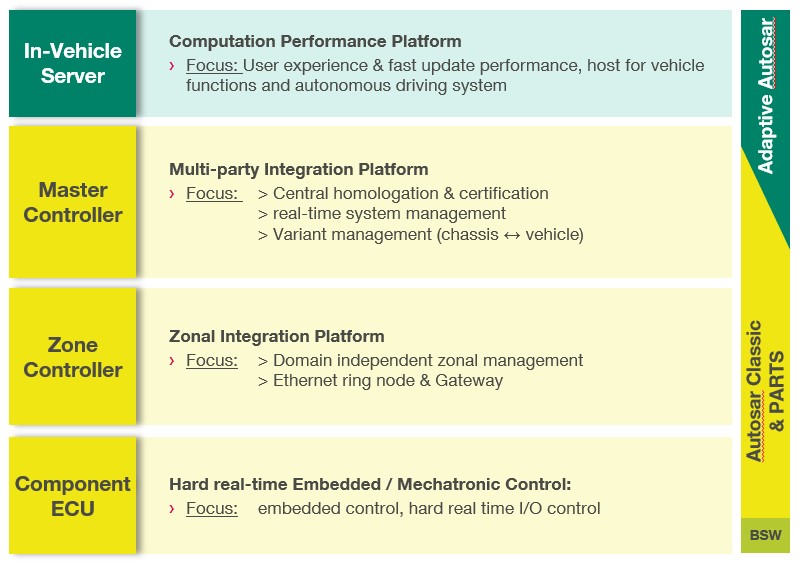 The future of vehicle electrical and electronics architecture is tending to be service oriented and would be based out of in-vehicle servers. Modularized and over-the-air (OTA) updates will become a necessity to maintain complex software and to enable new business models like ‘function-on-demand’. Functions and features will become “Appified”. The trend of mobile telephony will spill over to automobiles as users will look for customization of features and personalization of content. With common standards emerging on the in-vehicle infotainment system, third party developers will start providing vehicle content. Is such a scenario, the security needs have to evolve. Automotive cyber security must evolve into an anticipatory system as the current strategy of access control will not suffice. Redundancy must be ensured as to meet “fail operational” targets, computation will be ‘cloud’ based as well as localized.
The future of vehicle electrical and electronics architecture is tending to be service oriented and would be based out of in-vehicle servers. Modularized and over-the-air (OTA) updates will become a necessity to maintain complex software and to enable new business models like ‘function-on-demand’. Functions and features will become “Appified”. The trend of mobile telephony will spill over to automobiles as users will look for customization of features and personalization of content. With common standards emerging on the in-vehicle infotainment system, third party developers will start providing vehicle content. Is such a scenario, the security needs have to evolve. Automotive cyber security must evolve into an anticipatory system as the current strategy of access control will not suffice. Redundancy must be ensured as to meet “fail operational” targets, computation will be ‘cloud’ based as well as localized.
Vitesco Technologies being at the forefront of automotive electronics and carrying the legacy of automotive powertrain controllers has a bouquet of products and services to cater to the complete spectrum of vehicle electrical and electronic architecture. We are excited about the future as we are at the inflection point in the history of automobile industry and looking forward to contributing towards the future that is electrifying as well as sustainable.